2007/04/25
寢慄偺巇曽
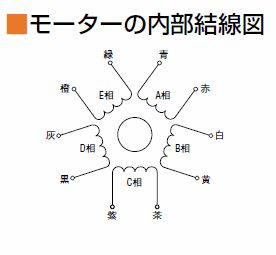
尰嵼敪攧偺儌乕僞乕扨懱偺5憡 PK僔儕乕僘偼
侾侽杮慄偱偡
2007/04/13


俆憡僗僥僢僾儌乕僞乕塣梡丒僥僋僯僢僋
2007/04/25
寢慄偺巇曽
尰嵼敪攧偺儌乕僞乕扨懱偺5憡 PK僔儕乕僘偼
侾侽杮慄偱偡
2007/04/13
![]()
![]()
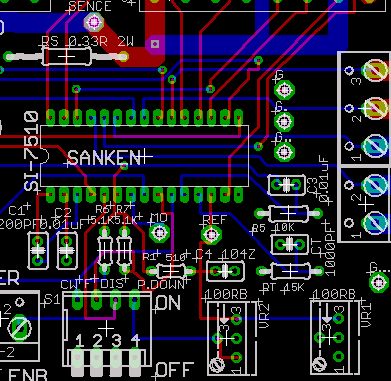
 慻傒棫偰忋偑傝 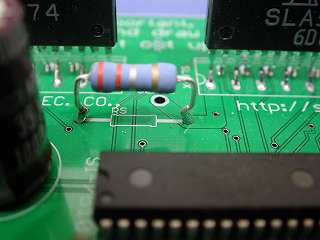 巁壔嬥懏旂枌掞峈偼彮偟晜偐偡偲擬偵嫮偔側傞   僙儔儈僢僋側偳僺僢僠偑嫹偄偺偱 儕乕僪傪僗僩儗乕僩偵嫺惓偟偰庢傝晅偗偰偔偩偝偄 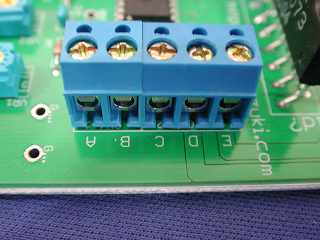 儌乕僞乕僐僱僋僞乕  僋儘僢僋俠俲丆惓媡俠乛俠丆侽倁僐儌儞 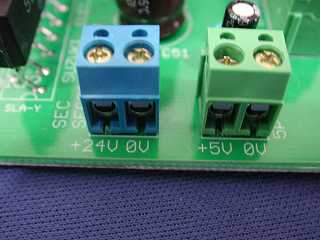 揹尮丂昗弨偱丂亄俀係倁 惂屼梡揹尮偼丂亄俆倁僪儔僀僶乕僀儞僞乕僼僃乕僗偺揹尮 偺亄俆倁偲摨偠曽偑椙偄偱偡 揹埑擖椡偐亄俆倁偵侾俲偺僾儖傾僢僾側偳偱愙懕偟偰偔偩偝偄 抂巕戜偺楢寢 偦傟偧傟偺懁柺偵傾儕峚偑晅偄偰偄傑偡 偦偺傾儕峚偵偰楢寢偡傞傛偆偵偟偰偔偩偝偄 敿揷傪晅偗傞慜偵慻傒棫偰偰偍偄偰偔偩偝偄    掕揹棳丂僠儑僢僺儞僌攇宍 揹棳愝掕偲寁應 寢慄偺巇曽 |
|||||||||||
| 掕揹棳丂僠儑僢僺儞僌攇宍丂丂忋傊 | |||||||||||
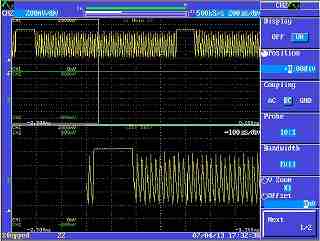
 |
俠倲傪嬌抂偵丂侾侽侽侽侽倫俥 偵愝掕丄俼倲傪俀侽俲兌 偲偟偨帪丅壜惉傝崅擬偵側偭偨 偦偙偱丄俠倲傪嬌抂偵丂侾俉侽侽倫俥 偵愝掕丄俼倲傪侾俆俲兌 偲偟偰傒偨丅 彮偟敪擬偺夵慞偑尒傜傟偨 傕偆彮偟梸挘偭偰 俠倲傪嬌抂偵丂俇俀侽倫俥丂俰丂俠俫 偵愝掕丄俼倲傪俀俀俲兌 偲偟偰傒偨丅 寢壥傪攇宍偵嶣傞 壜惉傝敪擬偺夵慞偵側偭偨傛偆偩 |
||||||||||
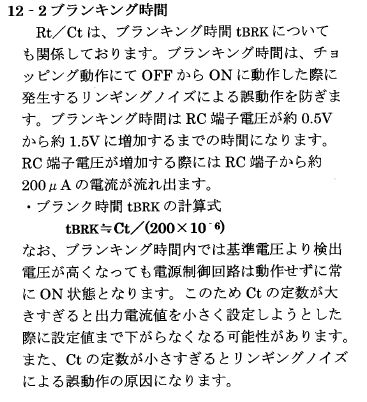 |
俠倲偼懡偒夁偓傞偲丄 僽儔儞僋僞僀儉偑戝偒偔側傝 夁揹棳傕尒摝偟偰丄 儌乕僞乕敪擬偵側傞 媡偵俠倲偑彫偝偡偓傞偲 儕儞僊儞僌僲僀僘偵傛傞 岆摦嶌偵惉傞偲偺偙偲 |
||||||||||
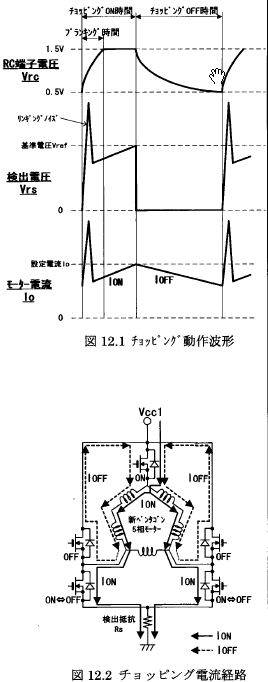 |
僆儕僄儞僞儖儌乕僞乕偺摿嫋嬱摦曽幃丂 儌乕僞乕慖掕偼廫暘拲堄偟偰偛巊梡壓偝偄 怴儁儞僞僑儞懳墳丒丒丒 尰嵼偺僆儕僄儞僞儖偺儌乕僞乕偼杦偳崯 愄偺偼僗僞乕寢慄傗俆憡10杮側偳桳傞偺偱 拲堄丂 |
||||||||||
 僋儕僢僋偡傞偲戝偒偔尒偊傑偡 |
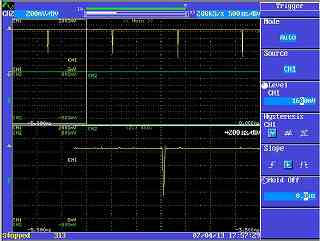
嵟懍嬱摦僷儖僗 | ||||||||||
 僋儕僢僋偡傞偲戝偒偔尒偊傑偡 |
掆巭帪僠儑僢僺儞僌攇宍 | ||||||||||
 僋儕僢僋偡傞偲戝偒偔尒偊傑偡 |
嵟懍偺丂俀侽亾偺僷儖僗 | ||||||||||
 僋儕僢僋偡傞偲戝偒偔尒偊傑偡 |
嵟懍僷儖僗嬱摦丂侾 | ||||||||||
 僋儕僢僋偡傞偲戝偒偔尒偊傑偡 |
嵟懍僷儖僗嬱摦丂俀 僽儔儞僋僞僀儉側偺偐 攇宍偺棫偪忋偑傝 栺丂俆倳俽埵 |
||||||||||
| 揹棳愝掕偲寁應丂丂忋傊 | |||||||||||
 |
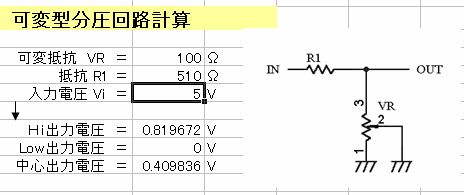
尰嵼 倁俼侾亖侾侽侽兌 俼侾亖俆侾侽兌 俼俽亖侽丏俁俁兌丂俀倂 |
||||||||||
 |
尰嵼偺 俼俤俥 |
||||||||||
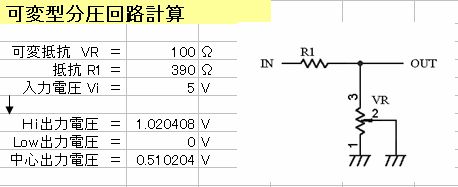 |
嵟戝揹棳愝掕梡 俼侾亖俁俋侽兌 俼俽亖侽丏俁俁兌//侽丏俁俁兌 乮侾丏俇俆兌乯 偵曄峏偡傞偲俁俙枠憡揹棳傪 憹傗偣傑偡丅 偦偺帪偼偟偭偐傝偲 曻擬傪偟偰偔偩偝偄 |
||||||||||
| 寢慄偺巇曽 | |||||||||||
 |
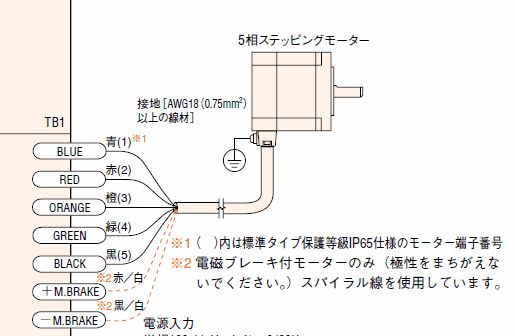
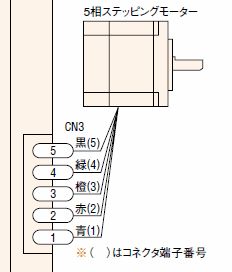
僆儕僄儞僞儖儌乕僞乕 10杮慄傪 怴儁儞僞僑儞僪儔僀僶乕偵 愙懕偡傞曽朄 暿儁乕僕嶲徠 偦偺懠丂俆杮慄偼
|
||||||||||
 |
|||||||||||
 |
|||||||||||
![]()
![]()